Thank you for your input.
What I did in the meantime:
(I): I have created a new board by copy the folder /RIOT/boards/atmega1284p to a new folder named /RIOT/boards/myboard2021_2
(II): I have also created a new module with “make generate-module” (which creates a new module in RIOT/sys/) named “myboard2021_hw” and “led”, and have copied the 2 *.c files from avr-based_sensor_node/source/_asnx_lib_/hw at master · DoWiD-wsn/avr-based_sensor_node · GitHub into it.
(III): I added into “Makefile.dep” of RIOT/boards/myboards2021_2 this:
USEMODULE += boards_common_atmega
USEMODULE += myboard2021_hw
USEMODULE += led
USEMODULE += xtimer
and added into RIOT/boards/myboards2021_2/includes the 2 header files “hw.h” and “led.h”.
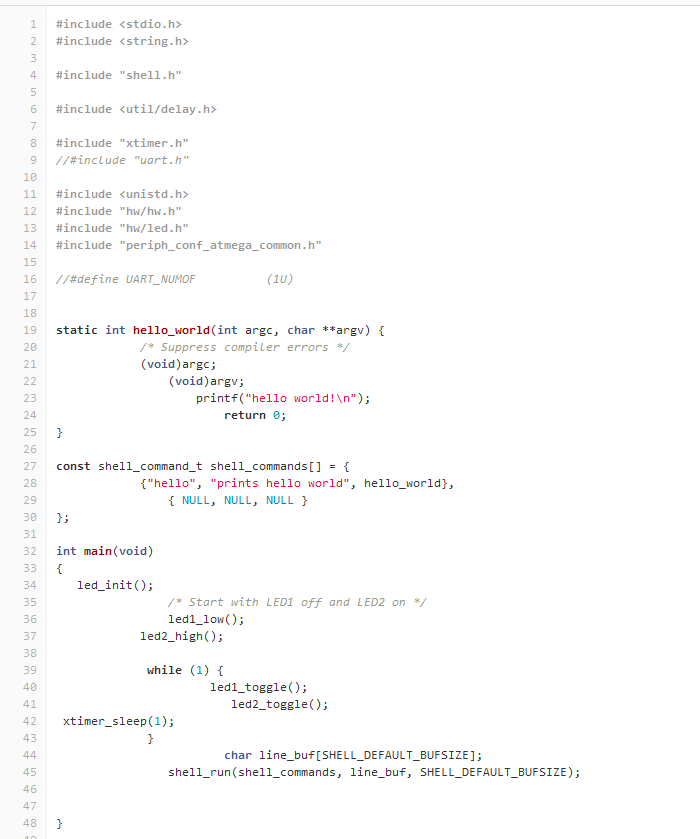
(IV): I have created a application file/directory with this main.c:
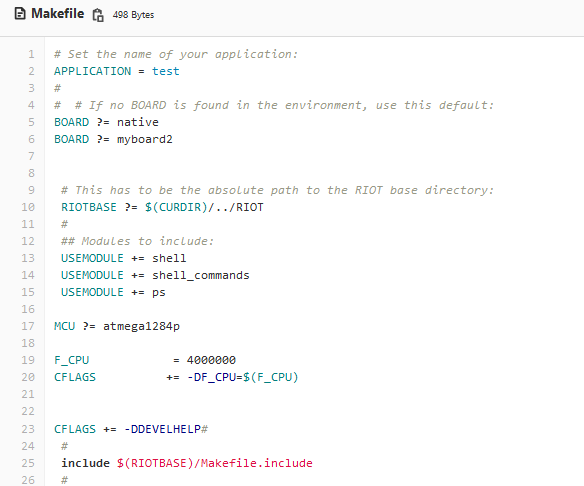
and this applciation Makefile:
and flashed it with:
sudo BOARD=myboard2021_2 AVRDUDE_PROGRAMMER=stk500v2 PORT=/dev/ttyACM0 make all flash
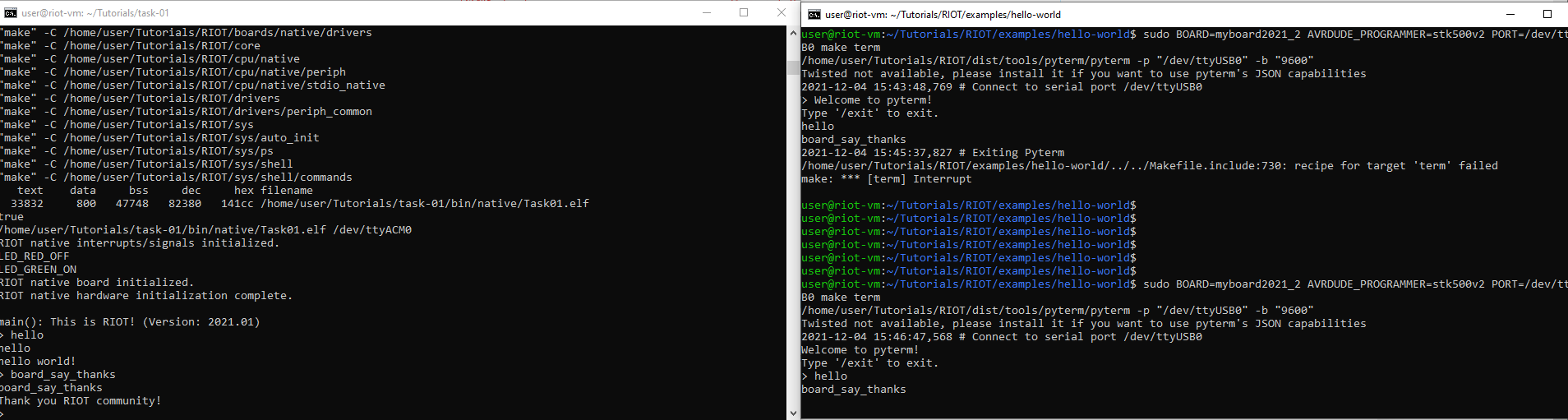
OUTPUT:
Blinky was working corretly! 
But UART is still not working 
I tried to run:
sudo BOARD=myboard2021_2 AVRDUDE_PROGRAMMER=stk500v2 PORT=/dev/ttyUSB0 make term
but the output is always:
/home/user/Tutorials/RIOT/dist/tools/pyterm/pyterm -p “/dev/ttyUSB0” -b “9600”
Twisted not available, please install it if you want to use pyterm’s JSON capabilities
2021-12-03 16:48:26,338 # Connect to serial port /dev/ttyUSB0
Welcome to pyterm!
Type ‘/exit’ to exit.
No output and input via UART possible.
Do you know how to change the UART dev from “UART 0” to “UART 1”?
I tried also to include the UART files from avr-based_sensor_node/source/_asnx_lib_/uart at master · DoWiD-wsn/avr-based_sensor_node · GitHub to a new module like discribed in (II) but it did not work.
→ and I also think that RIOT has a own uart and printf function!?
Do you have any idea how to run UART on UART1 on atmega1284p?